
近期,数学与系统科学学院复杂系统智能分析与控制科研团队联合江苏师范大学陈军教授、青岛理工大学王言前副教授,在信息物理系统安全控制领域取得新进展。我院研究生王志浩,以第一作者身份在在国际权威期刊《Reliability Engineering & System Safety》发表题为《Adaptive parameter estimation-based neural sliding mode control for uncertain singular Markovian jump systems against actuator attacks》的研究成果,论文通讯作者为庄光明教授,色播 为第一署名单位。
实际系统中存在的参数不确定性、状态不可测问题,以及通信网络开放带来的执行器恶意攻击,会严重破坏奇异马尔可夫跳变系统的稳定性与控制精度,开展面向不确定奇异马尔可夫跳变系统、兼顾参数自适应估计与执行器攻击抑制的鲁棒控制研究,具有重要理论与工程价值。滑模控制具备对扰动与不确定性的强鲁棒性,神经网络则可精准逼近未知非线性攻击信号,二者结合为解决复杂网络攻击下的安全控制问题提供有效途径。鉴于系统参数未知、执行器易遭篡改攻击、部分状态不可直接获取的现实约束,如何设计集状态观测、参数辨识、攻击补偿与滑模控制于一体的综合策略,在保证系统随机容许性的同时,有效抵消执行器攻击与参数摄动影响,仍是亟待解决的关键问题。为同时处理执行器恶意攻击与系统参数不确定双重挑战,本研究提出一种基于自适应参数估计的神经网络滑模控制策略。所提方法引入神经网络在线逼近执行器注入的未知非线性攻击信号,无需预设攻击边界假设,适用范围更广;结合自适应律实现不确定系统参数的实时估计,保证跟踪误差与估计误差联合收敛。
同时设计全新滑模观测器实现不可测状态重构,提升系统状态监测完备性;构建模态依赖积分滑模面并设计自适应滑模控制律,确保估计误差与系统状态有限时间抵达滑模流形,保证闭环系统随机容许性。该方法将自适应参数估计与神经网络滑模控制有机融合,可同步补偿执行器攻击与抑制参数不确定性,通过严格李雅普诺夫分析与线性矩阵不等式框架给出稳定判据,有效提升系统在复杂恶意攻击与模型不确定下的安全性、鲁棒性与控制平滑性。
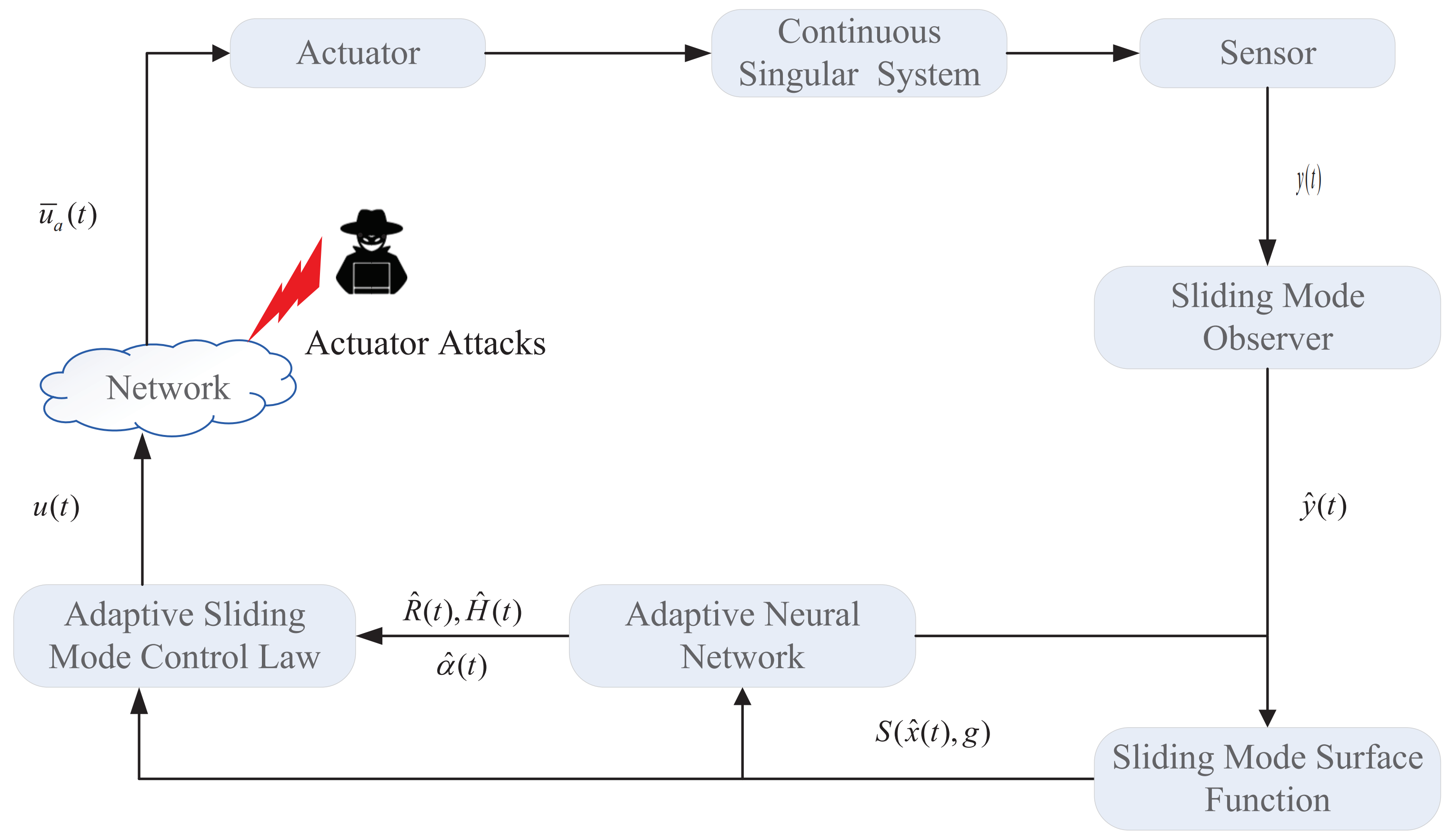
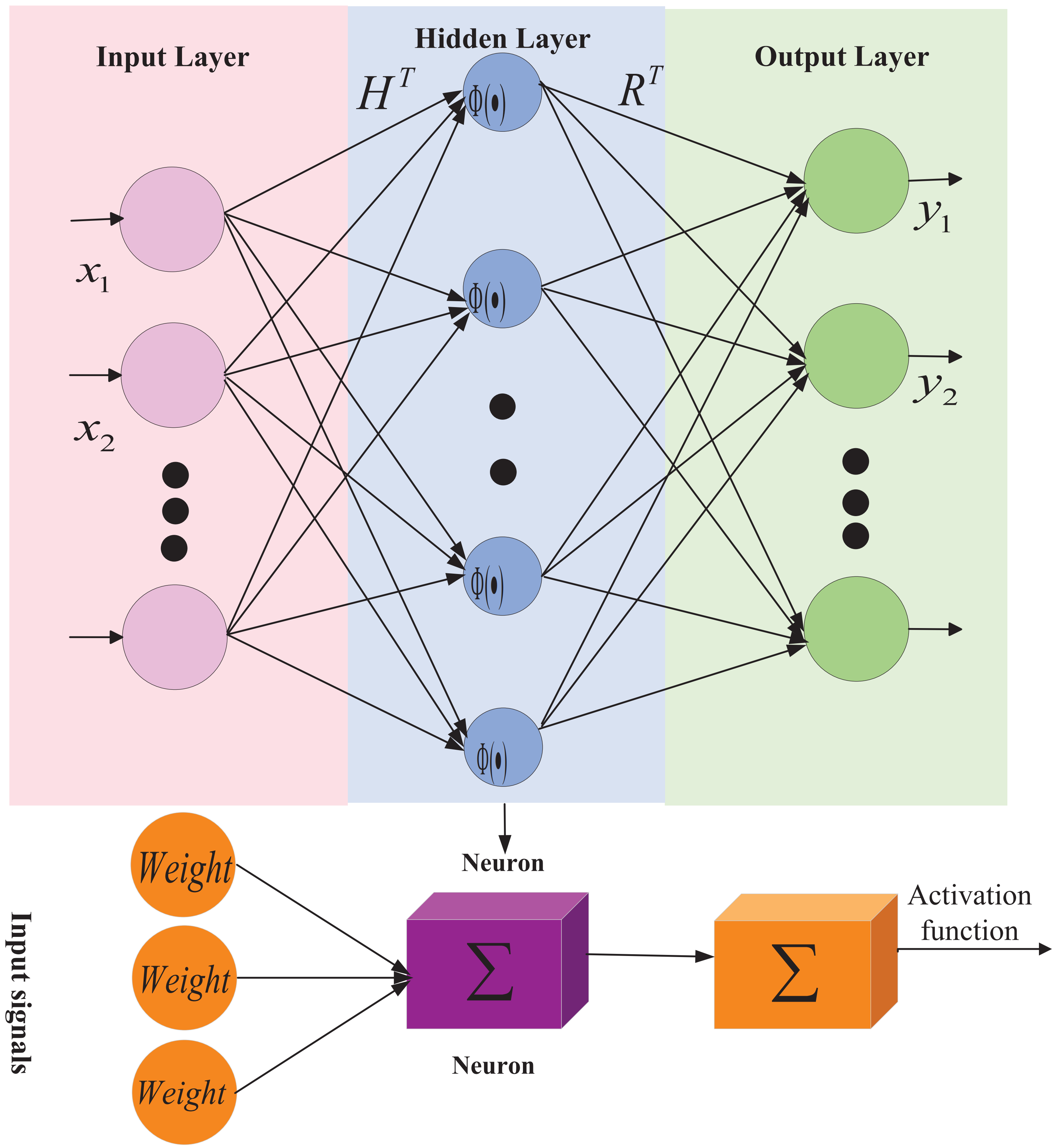
图1 执行器攻击下奇异马尔可夫跳变系统框架图 图2 三层前馈神经网络框架图
当实际系统中普遍存在的参数不确定性、状态不可测、外部扰动以及执行器恶意攻击等复杂因素相互耦合时,如何协同设计状态观测器、参数自适应更新机制与安全控制策略,以同时实现系统状态精准重构、未知参数在线辨识和奇异马尔可夫跳变系统的稳定控制,仍是当前面临的一大挑战,且上述多重不确定因素的叠加存在,也给系统稳定性分析与控制方案设计带来了极大困难,亟需深入研究以构建可靠的解决方法。此外,如何结合智能逼近方法与滑模控制技术,在不依赖攻击信号先验边界的前提下实现攻击补偿,同时规避奇异矩阵带来的分析难点,也值得进一步探究。
为实现系统状态精准观测、未知参数实时估计,并抵御执行器恶意攻击与参数不确定性带来的负面影响,保障奇异马尔可夫跳变系统稳定运行,本研究融合神经网络逼近方法与自适应滑模控制理论,设计了集状态观测、参数辨识、攻击补偿与抗扰控制于一体的综合控制方案。同时,借助滑模状态观测技术完成不可测系统状态的有效重构,通过自适应更新规则实现系统未知参数的实时辨识,利用神经网络对未知非线性执行器攻击进行在线逼近补偿,并构建模态依赖型积分滑模面,结合自适应控制策略完成闭环系统控制器设计。依托李雅普诺夫稳定性分析方法,推导得出保证闭环系统随机容许性的稳定条件,所提控制方法的有效性通过直流电机系统和主动汽车悬架系统得到了充分验证。
(a) (b)
(c) (d)
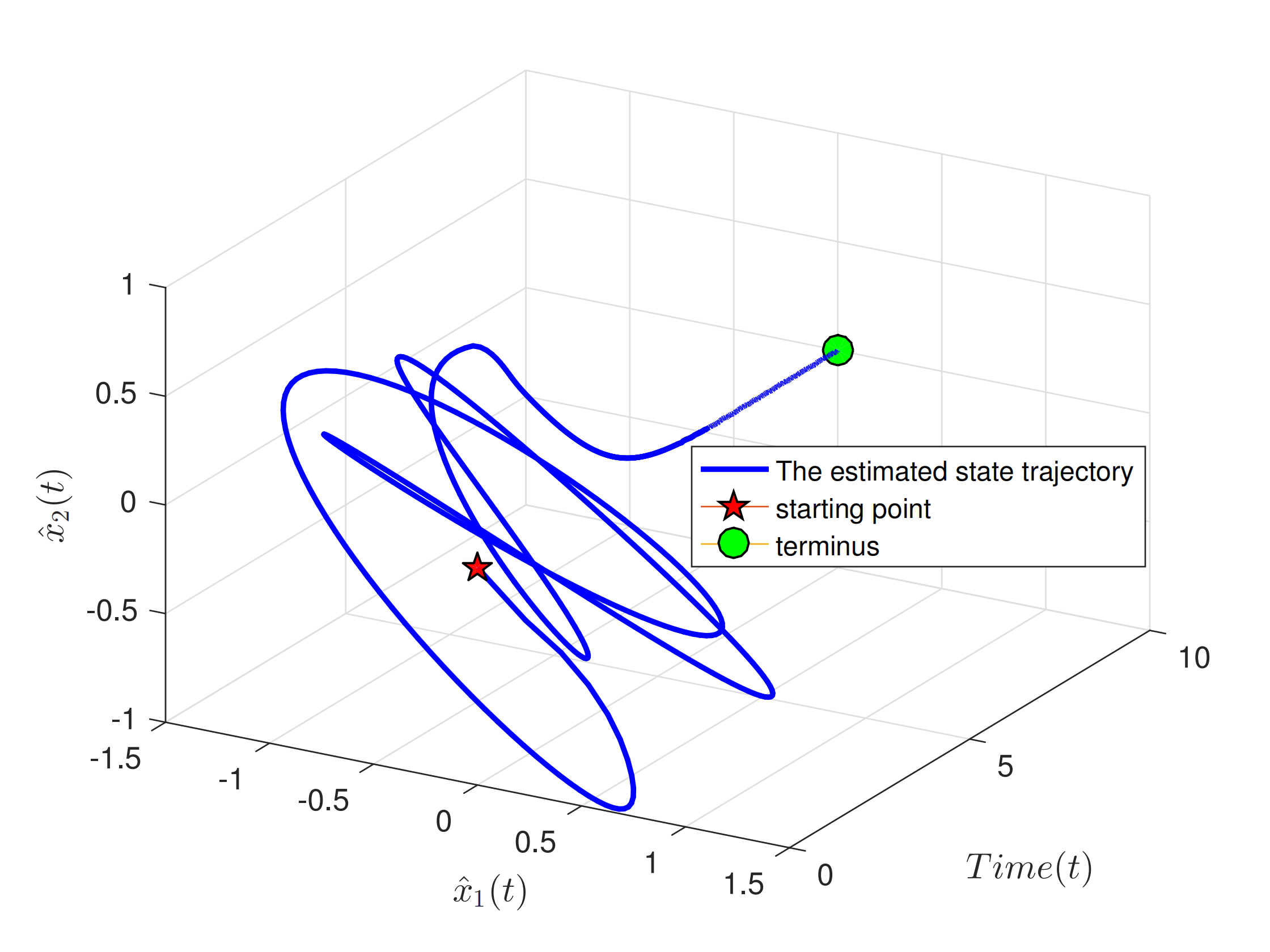
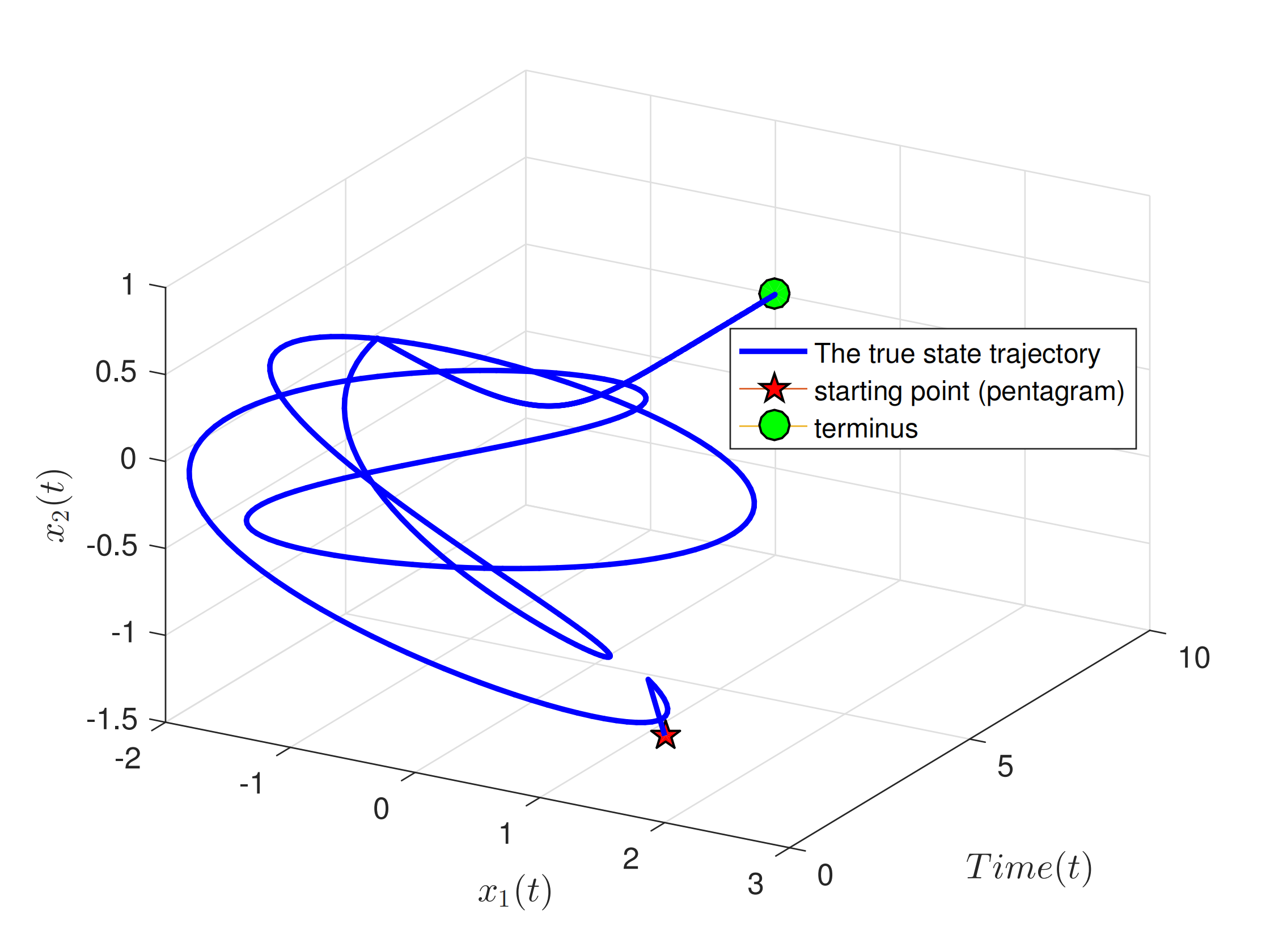
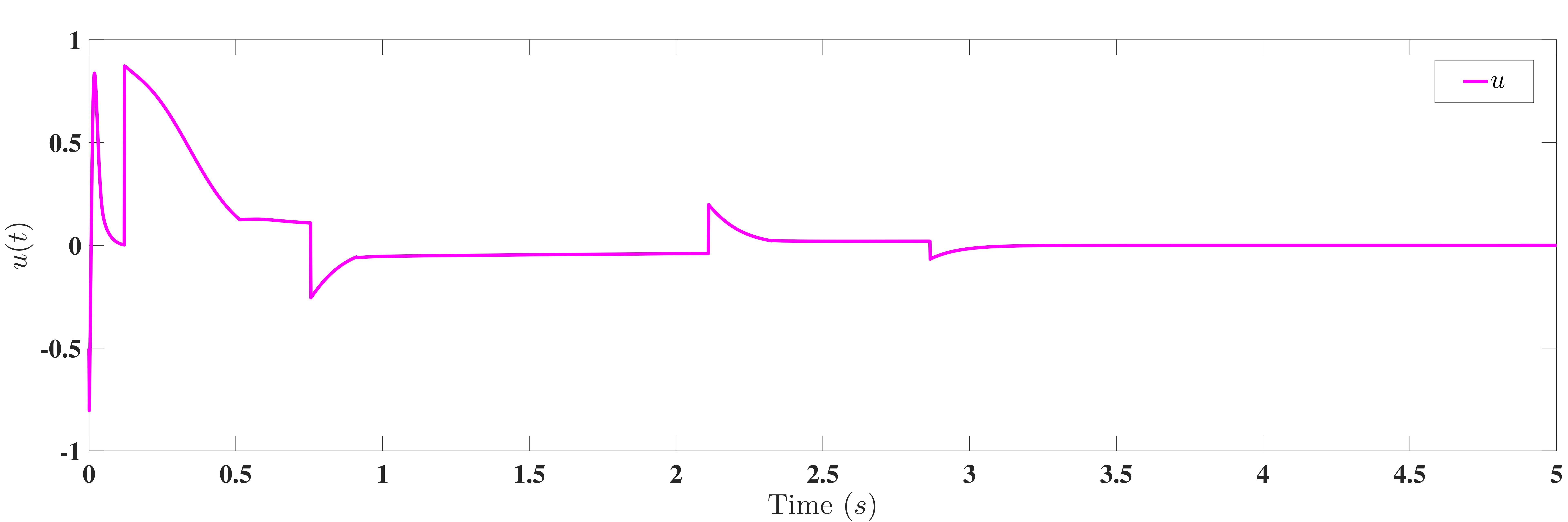
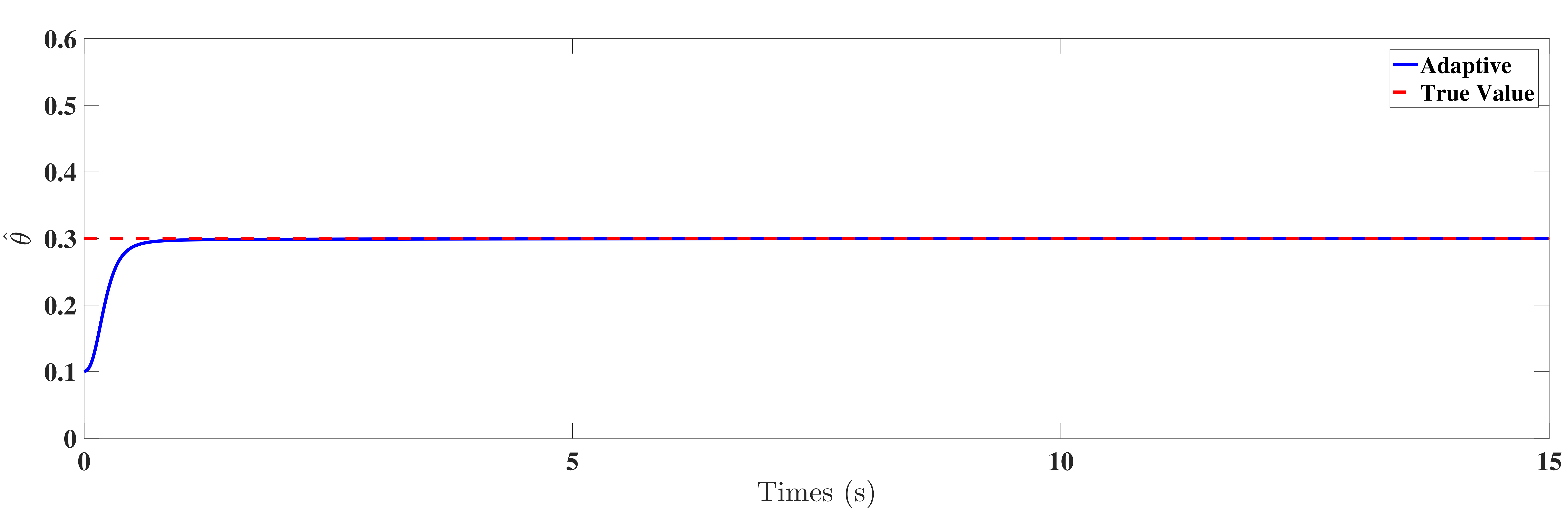
图3 执行器攻击下直流电机系统的状态轨迹、参数估计估计以及以及控制输入图像:(a) 估计状态的轨迹图;(b) 真实状态的轨迹图;(c) 自适应参数估计仿真图;(d) 控制输入图像
(e) (f) (g)
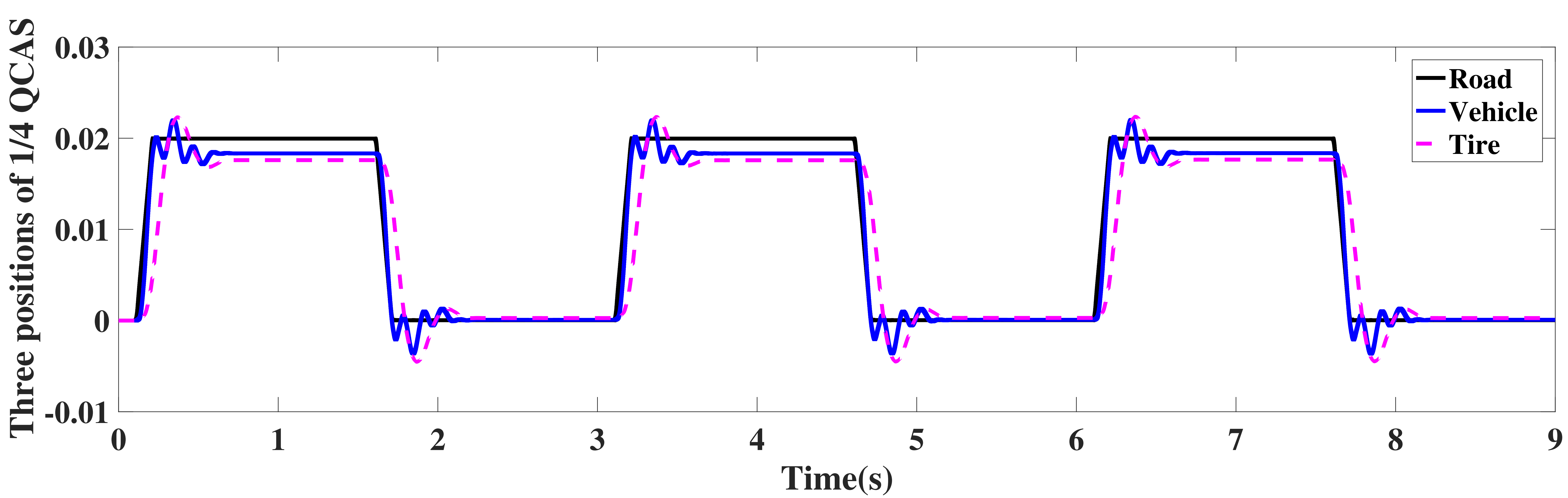
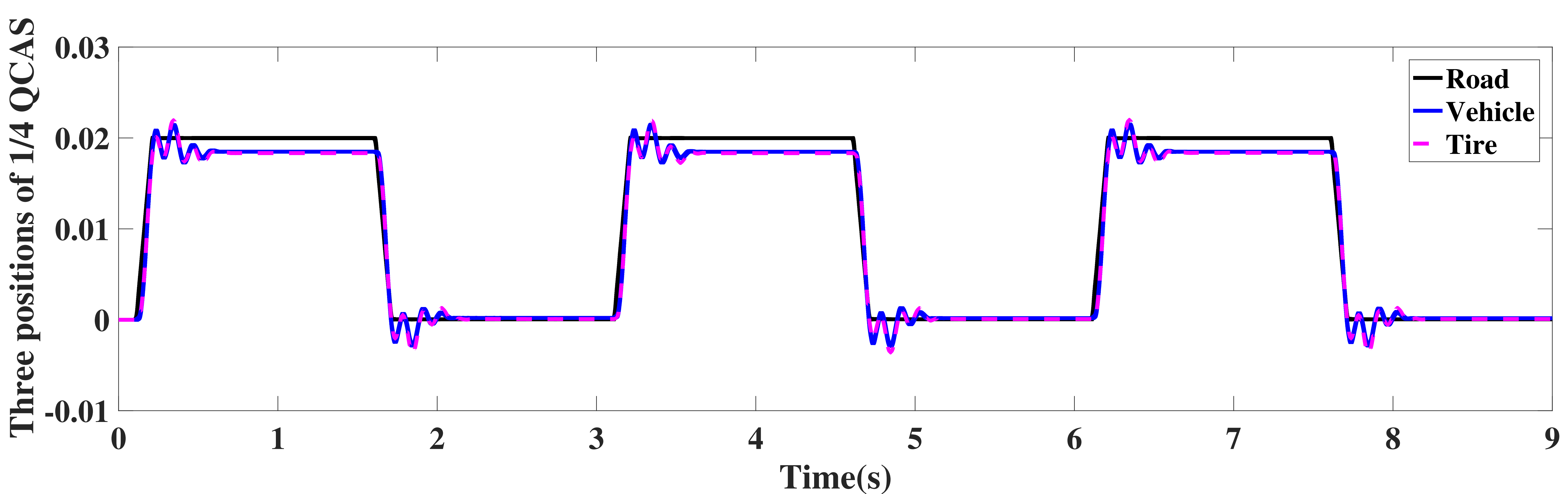
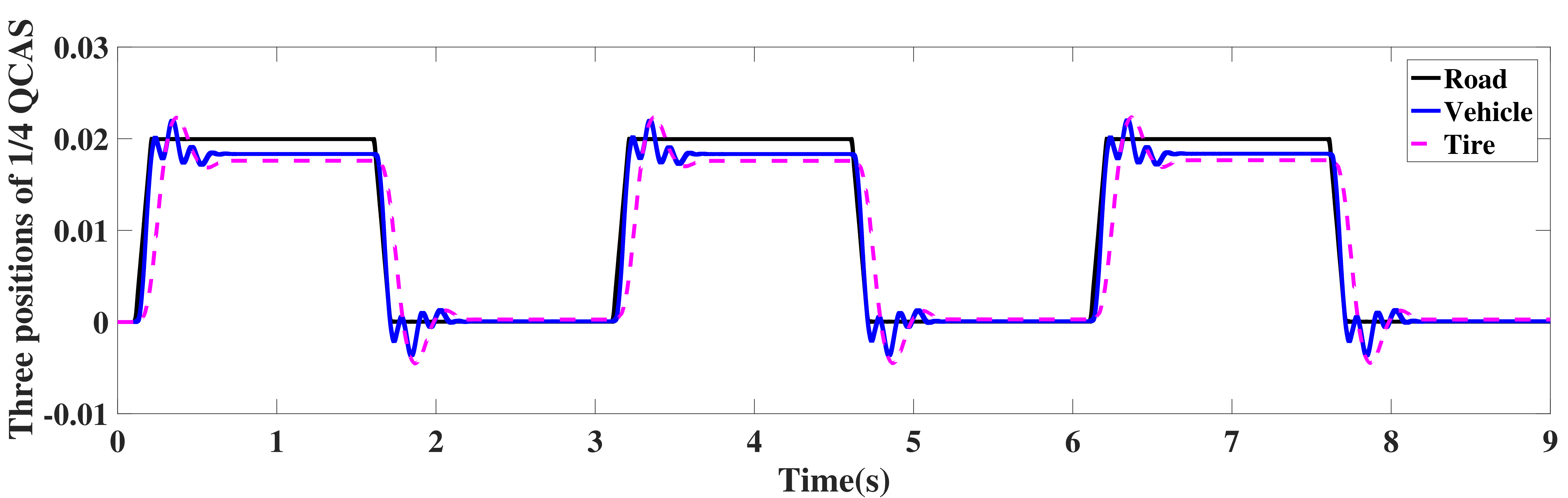
图4 不同类型控制器下汽车悬架系统位置轨迹图:(e) 神经自适应滑模控制器;(f) PID控制器;(g) 自适应滑模控制器